Autonomous Driving
• Automated Driving Algorithm

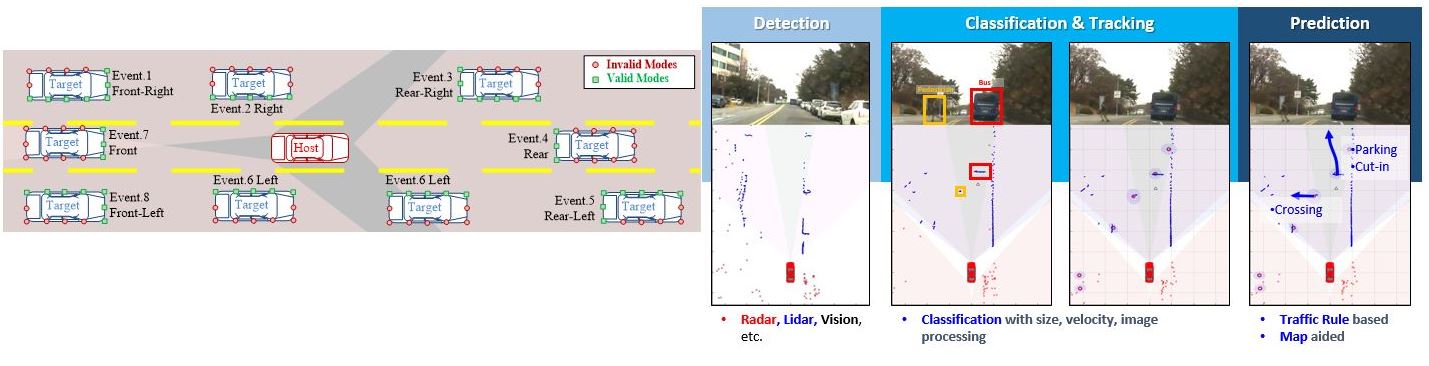
• Perception
- Obstacle Detection: Obstacle classification – Vehicle/Bicycle/Cyclist/Pedestrian/Other obstacles
: Multi-sensor fusion – Radar/LiDAR/Vision
: Intention Inference
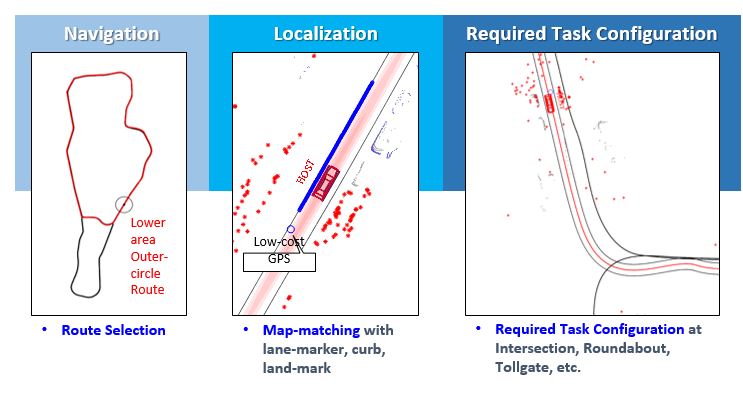
: Dead-reckoning
: Land mark detection
: Real-time Map matching

: Vehicle to Vehicle (V2V) Communication
: Vehicle to Infrastructure (V2I) Communication
: Autonomous Driving Control Center
• Decision
- Risk Assessment: Human – like driving characteristics
: Using sensor and predicted environmental information actively
: Predicting vehicle status and collision risk with present driving situation

: End to end path planning
: Lane Keeping, Lane Changing, Left/Right/U-Turn, Stop before Stop line

• Motion Planning and Control
- Integrated Motion Optimization with Environment & Dynamic Constraint: Drivable Area Decision
: Proper Level of Acceleration with Driver Acceptability
: Guarantee Dynamic Constraint / Safety
